VEHICLE STABILITY CONTROL SYSTEM, Diagnostic DTC:C1434

| DTC Code | DTC Name |
|---|---|
| C1434 | Steering Angle Sensor Output Malfunction |
DESCRIPTION
Steering sensor signals are sent to the skid control ECU (brake actuator assembly) via the CAN communication system. When there is a malfunction in the CAN communication system, it is detected by the steering sensor zero point malfunction diagnostic function.
| DTC Code | DTC Detection Condition | Trouble Area |
|---|---|---|
| C1434 | An error in communication between the skid control ECU and the steering sensor, or an abnormal steering sensor zero point. |
|
WIRING DIAGRAM
Refer to DTC C1432 Click here.
INSPECTION PROCEDURE
Note
Inspect the fuses for circuits related to this system before performing the following inspection procedure.
Tech Tips
-
When DTC U0073, U0123, U0124 and/or U0126 is output together with DTC C1434, inspect and repair the trouble areas indicated by DTC U0073, U0123, U0124 and/or U0126 first Click here.
-
When any of the speed sensors or the yaw rate sensor has trouble, DTCs for the steering sensor may be stored even when the steering sensor is normal. When DTCs for the speed sensors or yaw rate sensor are output together with DTCs for the steering sensor, inspect and repair the speed sensor and yaw rate sensor first, and then inspect and repair the steering sensor.
PROCEDURE
-
CHECK DTC
-
Clear the DTCs Click here.
-
Turn the engine switch off.
-
Turn the engine switch on (IG) again and check that no CAN communication system DTC is output Click here.
-
Start the engine.
-
Drive the vehicle at a speed of 35 km/h (22 mph) and turn the steering wheel to the right and left, and then check that no speed sensor or yaw rate sensor DTCs are output Click here.
Result Result Proceed to No CAN communication system, speed sensor, or yaw rate sensor DTCs are output A CAN communication system DTC is output (for LHD) B CAN communication system DTC is output (for RHD) C Speed sensor or yaw rate sensor DTC is output D Tech Tips
-
If there is a malfunction in any of the speed sensors or the yaw rate sensor, an abnormal value may be output although the steering sensor is normal.
-
If speed sensor and yaw rate sensor DTCs are output simultaneously, repair these two sensors first, and then inspect the steering sensor.
-
B 
GO TO CAN COMMUNICATION SYSTEM (HOW TO PROCEED WITH TROUBLESHOOTING) Click here
C
GO TO CAN COMMUNICATION SYSTEM (HOW TO PROCEED WITH TROUBLESHOOTING) Click here
D
REPAIR CIRCUIT INDICATED BY OUTPUT DTC Click here
A 
-
-
CHECK HARNESS AND CONNECTOR (IG1/ESS TERMINAL)
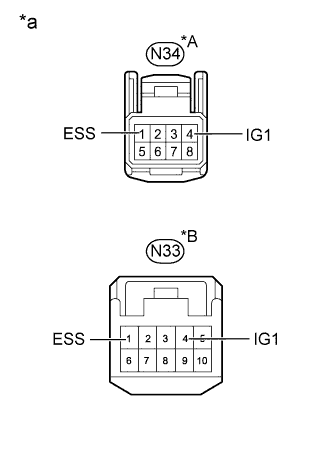
Text in Illustration *A w/o VGRS *B w/ VGRS *a Front view of wire harness connector
(to Steering Sensor)
-
Disconnect the steering sensor connector.
-
Measure the voltage according to the value(s) in the table below.
Standard Voltage w/o VGRS Tester Connection Switch Condition Specified Condition N34-4 (IG1) - Body ground Engine switch on (IG) 11 to 14 V w/ VGRS Tester Connection Switch Condition Specified Condition N33-4 (IG1) - Body ground Engine switch on (IG) 11 to 14 V -
Measure the resistance according to the value(s) in the table below.
Standard Resistance w/o VGRS Tester Connection Condition Specified Condition N34-1 (ESS) - Body ground Always Below 1 Ω w/ VGRS Tester Connection Condition Specified Condition N33-1 (ESS) - Body ground Always Below 1 Ω Result Result Proceed to NG A OK (w/o VGRS) B OK (w/ VGRS) C
B 
C
A 
REPAIR OR REPLACE HARNESS OR CONNECTOR
-
-
CHECK HARNESS AND CONNECTOR (BAT TERMINAL)
-
Disconnect the steering sensor connector.
-
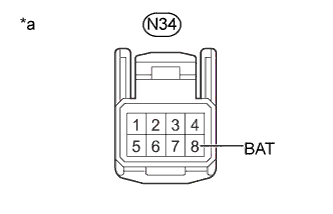
Text in Illustration *a Front view of wire harness connector
(to Steering Sensor)
Measure the voltage according to the value(s) in the table below.
Standard Voltage Tester Connection Condition Specified Condition N34-8 (BAT) - Body ground Always 11 to 14 V
NG
REPAIR OR REPLACE HARNESS OR CONNECTOR
OK
REPLACE STEERING SENSOR Click here
-
-
CHECK HARNESS AND CONNECTOR (BAT TERMINAL)
-
Disconnect the steering sensor connector.
-
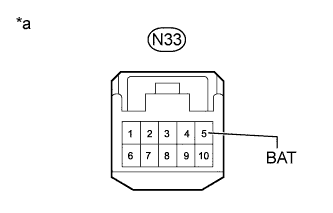
Text in Illustration *a Front view of wire harness connector
(to Steering Sensor)
Measure the voltage according to the value(s) in the table below.
Standard Voltage Tester Connection Condition Specified Condition N33-5 (BAT) - Body ground Always 11 to 14 V
NG
OK
REPLACE STEERING SENSOR Click here
-
-
CHECK HARNESS AND CONNECTOR (STEERING SENSOR - FRONT STEERING CONTROL ECU)
-
Disconnect the N33 steering sensor connector.
-
Disconnect the N104 front steering control ECU connector.
-
Measure the resistance according to the value(s) in the table below.
Standard Resistance Tester Connection Condition Specified Condition N33-5 (BAT) - N104-1 (+BO) Always Below 1 Ω N33-5 (BAT) - Body ground Always 10 kΩ or higher
NG
REPAIR OR REPLACE HARNESS OR CONNECTOR
OK
-
-
CHECK HARNESS AND CONNECTOR (BATTERY - FRONT STEERING CONTROL ECU)
-
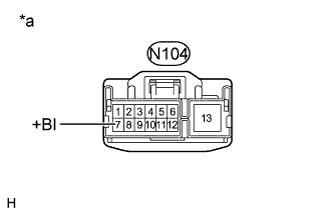
Text in Illustration *a Front view of wire harness connector
(to Front Steering Control ECU)
Disconnect the front steering control ECU connector.
-
Measure the voltage according to the value(s) in the table below.
Standard Voltage Tester Connection Condition Specified Condition N104-7 (+BI) - Body ground Always 11 to 14 V
NG
REPAIR OR REPLACE HARNESS OR CONNECTOR
OK
REPLACE FRONT STEERING CONTROL ECU Click here
-