PRE-COLLISION SYSTEM TERMINALS OF ECU
-
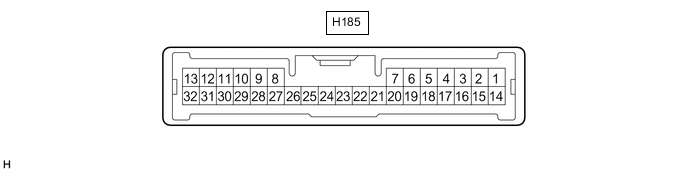
CHECK DRIVING SUPPORT ECU ASSEMBLY
-
Measure the voltage and resistance according to the value(s) in the table below.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition H185-7 (B) - H185-28 (GND) BE - W-B Power source Power switch on (IG) 11 to 14 V Power switch off Below 1 V H185-3 (BZ) - H185-28 (GND) V - W-B Skid control buzzer assembly output Power switch on (IG), buzzer not sounding 11 to 14 V Power switch on (IG), buzzer sounding Below 1 V H185-28 (GND) - Body ground W-B - Body ground Ground Always Below 1 Ω -
Check for pulses according to the value(s) in the table below.
Tech Tips
If the waveform is not similar to that shown in the illustration, a malfunction of a CAN bus line, terminating resistor, or the driving support ECU assembly is suspected.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition H185-8 (CA1P) - H185-28 (GND) LG - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 1)
H185-9 (CA1N) - H185-28 (GND) W - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 2)
H185-10 (CA2H) - H185-28 (GND) L - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 1)
H185-11 (CA2L) - H185-28 (GND) B - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 2)
-
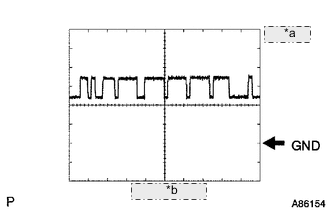
*a 1 V/DIV. *b 10 μsec./DIV. WAVEFORM 1
Item Content Terminal Name Between H185-8 (CA1P) - H185-28 (GND)
Between H185-10 (CA2H) - H185-28 (GND)
Tester Range 1 V/DIV., 10 μsec./DIV. Condition Power switch on (IG) Tech Tips
The waveform varies depending on the CAN communication signal.
-
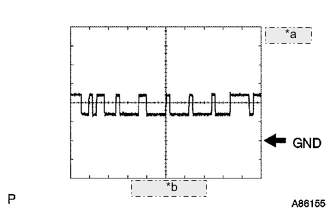
*a 1 V/DIV. *b 10 μsec./DIV. WAVEFORM 2
Item Content Terminal Name Between H185-9 (CA1N) - H185-28 (GND)
Between H185-11 (CA2L) - H185-28 (GND)
Tester Range 1 V/DIV., 10 μsec./DIV. Condition Power switch on (IG) Tech Tips
The waveform varies depending on the CAN communication signal.
-
-
-
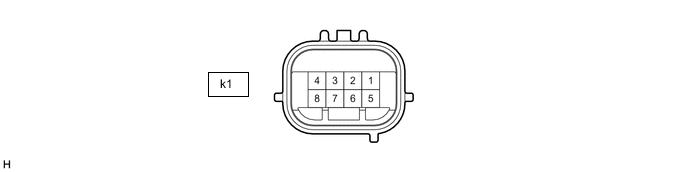
CHECK MILLIMETER WAVE RADAR SENSOR ASSEMBLY
-
Measure the voltage and resistance according to the value(s) in the table below.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition k1-8 (IGB) - k1-1 (SGND) BR - W-B Power source Power switch on (IG) 11 to 14 V k1-1 (SGND) - Body ground W-B - Body ground Ground Always Below 1 Ω -
Check for pulses according to the value(s) in the table below.
Tech Tips
If the waveform is not similar to that shown in the illustration, a malfunction of a CAN bus line, terminating resistor, or the millimeter wave radar sensor assembly is suspected.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition k1-3 (CA2H) - k1-1 (SGND) R - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 1)
k1-2 (CA2L) - k1-1 (SGND) W - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 2)
k1-5 (CA1P) - k1-1 (SGND) LG - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 1)
k1-6 (CA1N) - k1-1 (SGND) W - W-B CAN communication signal Power switch on (IG) Pulse generation
(See waveform 2)
-
*a 1 V/DIV. *b 10 μsec./DIV. WAVEFORM 1
Item Content Terminal Name Between k1-3 (CA2H) and k1-1 (SGND)
Between k1-5 (CA1P) and k1-1 (SGND)
Tester Range 1 V/DIV., 10 μsec./DIV. Condition Power switch on (IG) Tech Tips
The waveform varies depending on the CAN communication signal.
-
*a 1 V/DIV. *b 10 μsec./DIV. WAVEFORM 2
Item Content Terminal Name Between k1-2 (CA2L) and k1-1 (SGND)
Between k1-6 (CA1N) and k1-1 (SGND)
Tester Range 1 V/DIV., 10 μsec./DIV. Condition Power switch on (IG) Tech Tips
The waveform varies depending on the CAN communication signal.
-
-