FRONT SENSOR BEFORE STARTING ADJUSTMENT

CAUTION / NOTICE / HINT
CAUTION:
The pre-crash city sensor uses lasers to detect preceding vehicles. The pre-crash city sensor is classified as a Class 1M laser product according to the IEC 60825-1 standard.
These lasers are not harmful to the naked eye. However, it is necessary to observe the following precautions. Failure to do so may result in severe visual impairment, or at worst, loss of eyesight.
-
To avoid hazardous laser radiation exposure, never attempt to disassemble the pre-crash city sensor or perform maintenance procedures that are not described in the repair manual. When disassembled, the pre-crash city sensor is classified as a Class 3B laser product according to the IEC 60825-1 standard and poses an eye injury risk.
-
Do not look into the pre-crash city sensor using a magnifying glass, microscope or other optical instrument from a distance of 100 mm (3.94 in.) or less.
| *1 | Laser Classification Label | *2 | Laser Explanatory Label |
| *1 | Laser Classification Label | *2 | Laser Explanatory Label |
| Maximum average power | 45 mW |
| Pulse duration | 33 ns |
| Wavelength | 905 nm |
| Divergence (horizontal X vertical) | 28° X 12° |
Note
When replacing the windshield glass of a vehicle equipped with a pre-crash city sensor, make sure to use a Toyota genuine part. If a non-Toyota genuine part is used, the pre-crash city sensor may not be able to be installed due to a missing bracket or the pre-crash system may not operate properly due to a difference in the transmissivity of the windshield glass or the shape of the black ceramic border.
Tech Tips
-
Purpose of Pre-crash City Sensor Optical Axis Learning
-
If the installation position or orientation of the pre-crash city sensor is changed due to it being replaced with a new one or the windshield glass sub-assembly being replaced or removed and installed, it is necessary to perform pre-crash city sensor optical axis learning for the pre-crash city sensor to learn the driving direction of the vehicle and its horizontal axis in order for each driving support system to operate correctly.
-
Characteristics of Pre-crash City Sensor
-
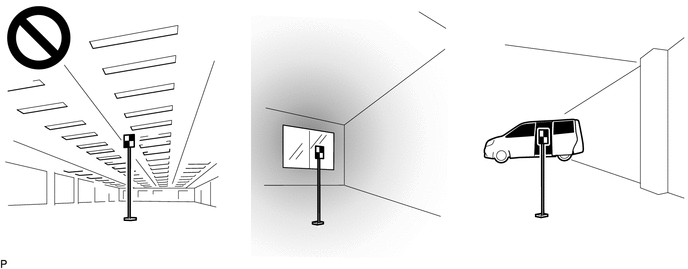
As the pre-crash city sensor recognizes targets using image processing based on differences in contrast, when performing pre-crash city sensor optical axis learning, if there are overhead lights, windows, reflective objects, or high contrast objects behind the target, the contrast between background objects may be detected as high and may be misrecognized as a target.
-
By blocking objects behind the target which may be misrecognized as a target, the pre-crash city sensor can more easily recognize the target and complete pre-crash city sensor optical axis learning.
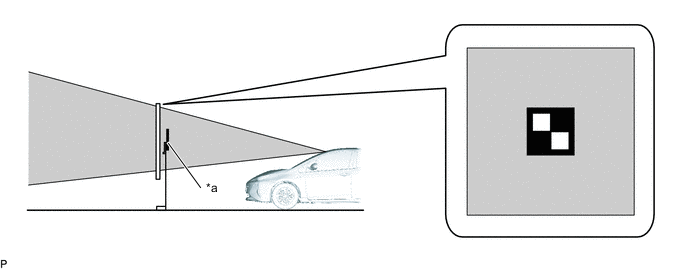
*a Target - - 
Target recognition area - - -
Pre-crash city sensor optical axis learning may fail if it is performed under any of the following conditions.
-
Light Shining from Behind Target (Backlit)
As the target will appear dark to the pre-crash city sensor if the target is backlit, the contrast of the black and white parts of the target will decrease and the target may not be recognized.

-
Target Partially Illuminated by Light from Windows
If the surface of the target is unevenly illuminated, the contrast of the black and white parts of the target will decrease and the target may not be recognized.
-
Entire Target not Illuminated
If the target is placed in an area that is dark, the contrast between the target and the background will decrease and the target may not be recognized.
-
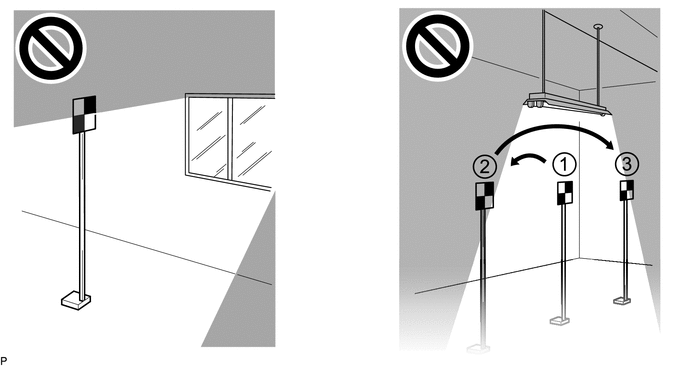
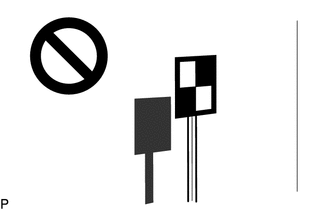
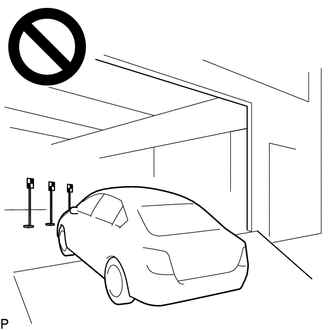
Shadow of Target is Cast onto Wall
Make sure that the shadow of the target is cast onto a wall as this may cause a target recognition error.
-
Reflective Object on Target Surface
If an object, such as clear adhesive tape, is attached to the target surface or if the target is laminated, the target surface will reflect light. As the reflected light will appear white to the pre-crash city sensor, the target may not be recognized.
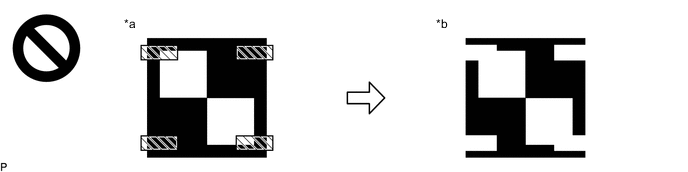
*a Actual Target *b Target as Seen by Pre-crash City Sensor 
Reflective Object or Surface - - -
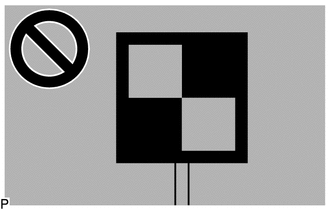
Border of Black and White Parts of Target are Blurry or Distorted
If the borders of the black and white parts of the target appear blurry to the pre-crash city sensor, the detected contrast will be low and the target may not be recognized.

-
Target is Moving
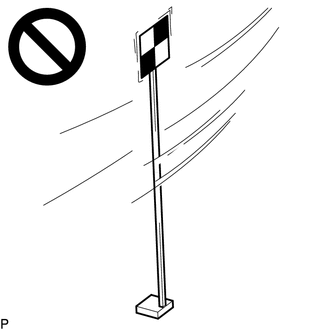
If the target is moving, due to being blown by the wind, etc., it may not be recognized.
-
Target and Vehicle are not Level
If the target and vehicle are not level when learning is performed, an incorrect center of the direction of travel of the vehicle may be learned or the pre-crash city sensor may not be able to detect the target.
-
Recognition Method
-
Pre-crash city sensor optical axis learning can be performed by using either One Time Recognition or Sequential Recognition.
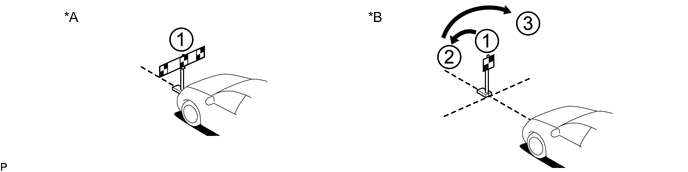
*A for One Time Recognition *B for Sequential Recognition Recognition Method Target Position Number of Times Target Recognition Performed One Time Recognition 1 (In front of front bumper) 1 Sequential Recognition 3 (3 m (9.84 ft.) from the pre-crash city sensor) 3 -
One Time Recognition is an optical axis learning method in which 3 targets are recognized simultaneously at 1 position directly in front of the front bumper.
-
Sequential Recognition is an optical axis learning method in which 1 target is recognized sequentially at 3 positions 3 m (9.84 ft.) from the pre-crash city sensor.