TOYOTA PARKING ASSIST-SENSOR SYSTEM OPERATION CHECK
-
CHECK INITIAL CHECK FUNCTION
-
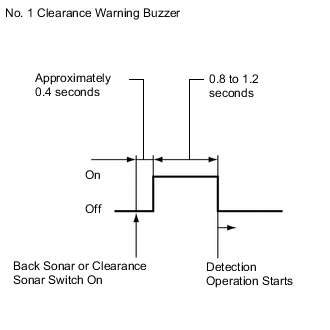
Check the initial check function for the buzzer.
-
When the back sonar or clearance sonar switch is turned on, check that the following occurs: 1) after 0.4 seconds, the buzzer sounds for approximately 0.8 to 1.2 seconds, and 2) the system starts the obstacle detection operation.
-
-
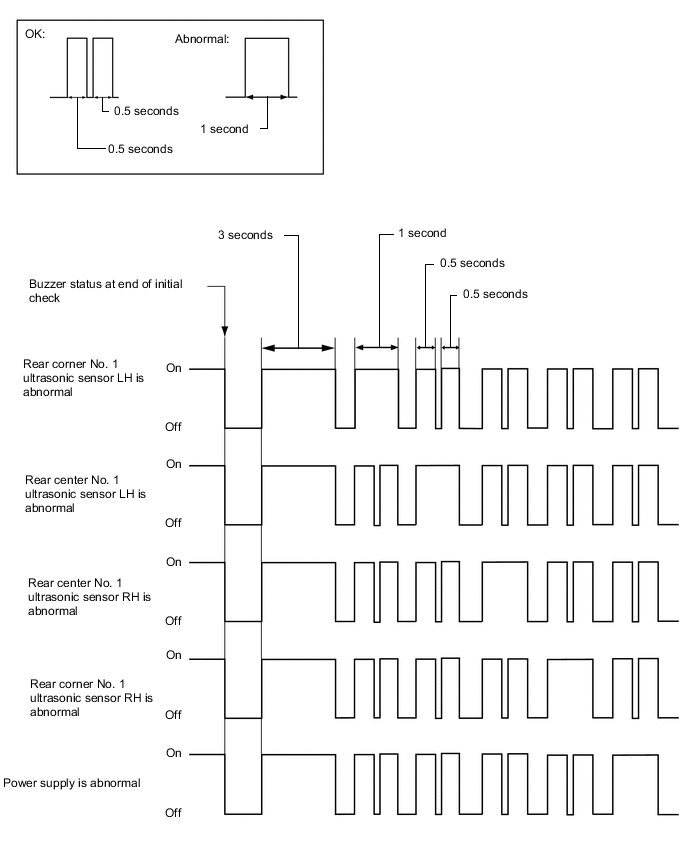
Check the initial check function for the sensor.
-
Approximately 0.4 seconds after the ignition switch is turned to ON and the back sonar or clearance sonar switch is turned on, all the sensors are checked by the system.
-
When the shift lever is operated, the system start obstacle detection operation.
-
-
If the sensor is found to have an anomaly due to an open circuit, the buzzer sounds after the initial check function is completed to inform the driver and indicate which sensor is abnormal.
-
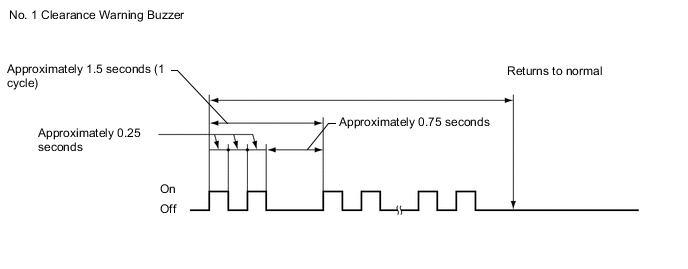
When the ECU judges that the sensor needs to be repaired or cleaned:
-
-
-
DETECTION RANGE MEASUREMENT AND INDICATOR CHECK
CAUTION:
Apply the parking brake securely so that the vehicle does not move.
-
Turn the ignition switch to ON.
-
Turn the back sonar or clearance sonar switch on.
-
Move the shift lever to R to check the rear corner sensors and rear center sensors.
-
Move a pole around the sensor to measure the detection range of the sensor.
Note
-
These detection ranges are applicable when positioning a pole with a diameter of φ60 mm (2.36 in.) parallel or perpendicular to the ground.
-
The ranges vary depending on the measuring method and type of obstacle (such as walls).
-
For close-range and medium-range detection, the values shown are for when using a pole with a diameter of 60 mm (2.36 in.). For long-range detection, the values shown are for when using walls.
-
Sensor detection range
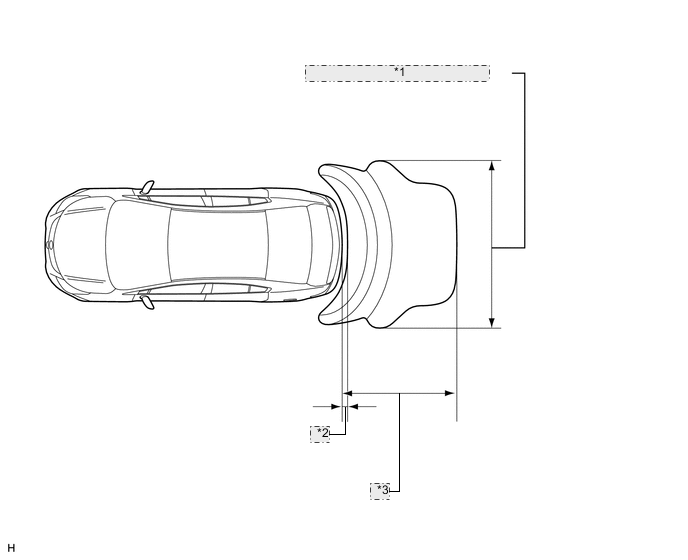
*1 Approximately 2500 mm (98.4 in.) *2 Approximately 80 mm (3.15 in.) *3 Approximately 1600 +/-150 mm (63.0 +/-5.91 in.)
-
-
When the ultrasonic sensors have detected an obstacle, check that the buzzer sounds with the back sonar or clearance sonar switch on.
Operation Condition Shift Lever Position Buzzer Detection Back LH
Back RH
Rear Corner LH
Rear Corner RH
R Sounds Sounds
-
Check that the buzzer sounds with the back sonar or clearance sonar switch on.
Rear Corner Detection Range Detection Distance 1. Close-range detection Within 250 +/-25 mm (9.84 +/-0.984 in.) 2. Medium-range detection 250 +/-25 to 375 +/-37.5 mm (9.84 +/-0.984 to 14.8 +/-1.48 in.) 3. Long-range detection 375 +/-37.5 to 450 +/-50 mm (14.8 +/-1.48 to 17.7 +/-1.97 in.) Rear Center Detection Range Detection Distance 1. Close-range detection Within 350 +/-35 mm (13.8 +/-1.38 in.) 2. Medium-range detection 350 +/-35 to 475 +/-47.5 mm (13.8 +/-1.38 to 18.7 +/-1.87 in.) 3. Long-range detection 475 +/-47.5 to 675 +/-60 mm (18.7 +/-1.87 to 26.6 +/-2.36 in.) 4. Maximum long-range detection 675 +/-60 to 1600 +/-150 mm (26.6 +/-2.36 to 63.0 +/-5.91 in.) Tech Tips
Ultrasonic waves are used to measure the detection range. However, the detection range may vary depending on the ambient temperature.
-
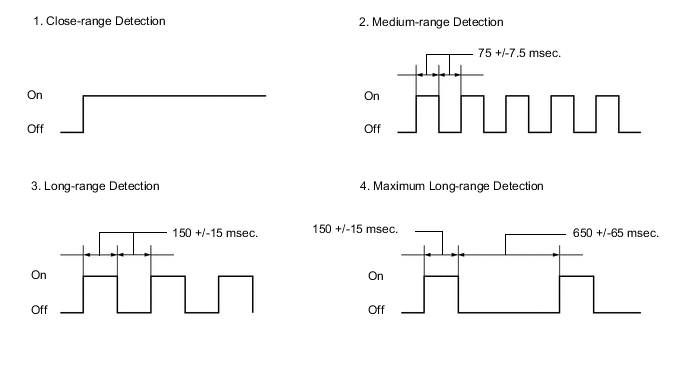
Check the buzzer when the back sensors and rear corner sensors have detected an obstacle.
Operation Condition Ignition Switch Back Sonar or Clearance Sonar Switch Shift Lever Position ON On R Buzzer Detection Range Buzzer 1. Close-range detection Sounds continuously 2. Medium-range detection Sounds intermittently
(ON: 75 msec./OFF: 75 msec.)
3. Long-range detection Sounds intermittently
(ON: 150 msec./OFF: 150 msec.)
4. Maximum long-range detection Sounds intermittently
(ON: 150 msec./OFF: 650 msec.)
Tech Tips
Ultrasonic waves are used to measure the detection range. However, the detection range may vary depending on the ambient temperature.
-
-