THEFT DETERRENT SYSTEM, Diagnostic DTC:B2769
| DTC Code | DTC Name |
|---|---|
| B2769 | Tilt Sensor Signal Circuit Malfunction |
DESCRIPTION
The tilt sensor (yaw rate sensor) conducts self-diagnosis immediately after power is supplied to the sensor (when the theft deterrent system is set).
If a malfunction is detected in the CSIF line, the main body ECU (multiplex network body ECU) stores this DTC.
| DTC No. | Detection Item | DTC Detection Condition | Trouble Area |
|---|---|---|---|
| B2769 | Tilt Sensor Signal Circuit Malfunction |
After a normal/malfunction signal is output from the tilt sensor (yaw rate sensor) as a result of self-diagnosis, the following malfunctions are detected: |
|
| Vehicle Condition | |||
|---|---|---|---|
| Pattern 1 | Pattern 2 | ||
| Diagnosis Condition | Always | ○ | ○ |
| Malfunction Status | Open in CSIF line circuit | ○ | - |
| Reception of signals other than normal/malfunction signal | - | ○ | |
| Detection Time | - | - | |
| Number of Trips | 1 trip | 1 trip | |
Tech Tips
DTC will be output when conditions for either of the patterns in the table above are met.
WIRING DIAGRAM
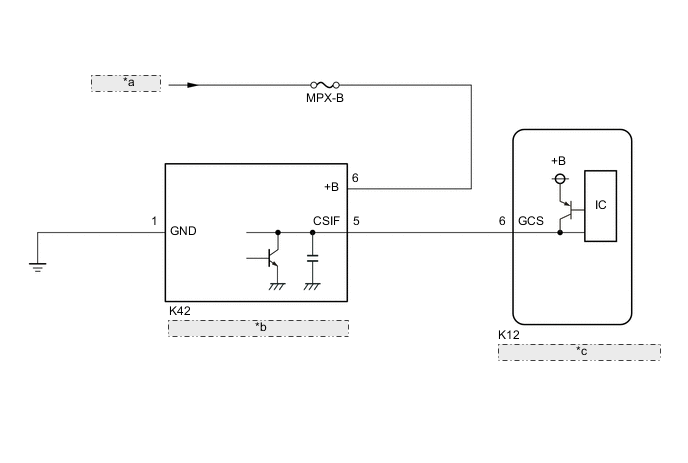
| *a | from Battery |
| *b | Tilt Sensor (Yaw Rate Sensor) |
| *c | Main Body ECU (Multiplex Network Body ECU) |
CAUTION / NOTICE / HINT
Note
-
If the main body ECU (multiplex network body ECU) is replaced, refer to Service Bulletin.
-
When replacing the tilt sensor (yaw rate sensor), perform zero point calibration.
-
Inspect the fuses for circuits related to this system before performing the following procedure.
PROCEDURE
-
CHECK HARNESS AND CONNECTOR (BATTERY - TILT SENSOR (YAW RATE SENSOR) - BODY GROUND)
-
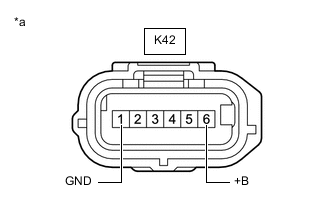
*a Front view of wire harness connector
(to Tilt Sensor (Yaw Rate Sensor))
Disconnect the tilt sensor (yaw rate sensor) connector.
-
Measure the voltage and resistance according to the value(s) in the table below.
Standard Voltage Tester Connection Condition Specified Condition K42-6 (+B) - Body ground Always 11 to 14 V Standard Resistance Tester Connection Condition Specified Condition K42-1 (GND) - Body ground Always Below 1 Ω Result Proceed to OK NG
NG 
REPAIR OR REPLACE HARNESS OR CONNECTOR
OK 
-
-
CHECK TILT SENSOR (YAW RATE SENSOR)
-
Reconnect the tilt sensor (yaw rate sensor) connector.
-
Using an oscilloscope, check the waveform.
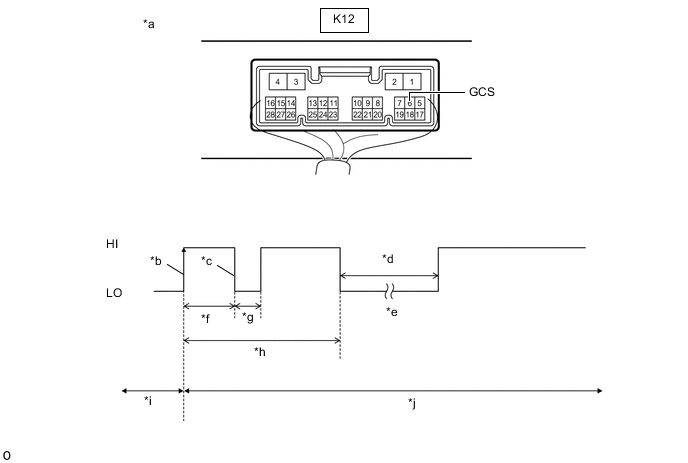
*a Component with harness connected
(Main Body ECU (Multiplex Network Body ECU))
*b CSIF Initial Signal *c CSIF Initial Response *d Approximately 1.0 Second *e Initial Diagnosis *f Approximately 1.0 to 1.6 Seconds *g Approximately 0.05 Seconds *h Approximately 5.5 Seconds *i Disarmed State *j Arming Preparation State Measurement Condition Item Content Tester Connection K12-6 (GCS) - Body ground Tool Setting 2 V/DIV., 100 ms./DIV. Condition Theft deterrent system is set (system changes from disarmed state to arming preparation state) Tech Tips
-
If the tilt sensor (yaw rate sensor) is normal, an initial response is output in response to the HI input from the main body ECU (multiplex network body ECU).
-
If the waveform output remains LO, there may be a problem with the main body ECU (multiplex network body ECU), as there is no input from the main body ECU (multiplex network body ECU).
OK The waveform is output properly (HI is 6.5 V or higher and LO is below 1 V). Result Result Proceed to OK (There is an initial response) A NG (There is no initial response and the waveform output remains HI) B NG (Waveform output remains LO) C -
A
USE SIMULATION METHOD TO CHECK Click here
B
REPLACE TILT SENSOR (YAW RATE SENSOR) Click here
C
-
-
CHECK HARNESS AND CONNECTOR (TILT SENSOR (YAW RATE SENSOR) - MAIN BODY ECU (MULTIPLEX NETWORK BODY ECU))
-
Disconnect the K12 main body ECU (multiplex network body ECU) connector.
-
Disconnect the K42 tilt sensor (yaw rate sensor) connector.
-
Measure the resistance according to the value(s) in the table below.
Standard Resistance Tester Connection Condition Specified Condition K12-6 (GCS) - K42-5 (CSIF) Always Below 1 Ω K12-6 (GCS) or K42-5 (CSIF) - Body ground Always 10 kΩ or higher Result Proceed to OK NG
OK
REPLACE MAIN BODY ECU (MULTIPLEX NETWORK BODY ECU) Click here
NG
REPAIR OR REPLACE HARNESS OR CONNECTOR
-