СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ УПРАВЛЕНИЕ КООРДИНИРОВАННОГО УПРАВЛЕНИЯ С EPS
УПРАВЛЕНИЕ В СИСТЕМЕ
Координированное управление рулевым управлением включает управление тормозной системой и системой рулевого управления с усилителем для обеспечения отличной курсовой устойчивости автомобиля и плавного управления.
Если разгон или торможение осуществляется на дороге с неоднородным поверхностным трением или в случае недостаточной или избыточной поворачиваемости, координированное управление рулевым управлением приводит в действие каждую систему в зависимости от ситуации и обеспечивает управление крутящим моментом системы помощи рулевого управления, чтобы помочь водителю осуществить корректировку рулевого управления.
Figure 1. Общий обзор координированного управления рулевым управлением 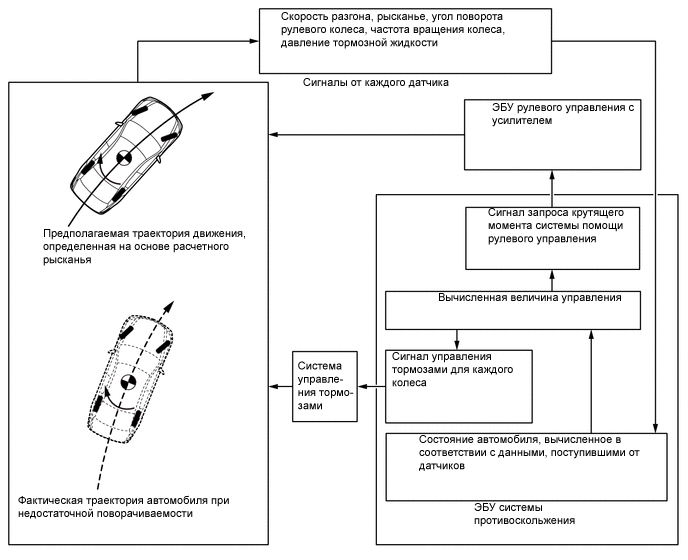
Управление разгоном на дороге с неоднородным поверхностным трением
При разгоне на дороге с неоднородным поверхностным трением, например, когда левые колеса находятся на асфальтовом покрытии, а правые — на снегу, автомобиль демонстрирует тенденцию к повороту в сторону с меньшим трением. Помимо традиционного управления системы TRC, координированное управление рулевым управлением обеспечивает управление крутящим моментом системы помощи рулевого управления, чтобы помочь водителю осуществить корректировку рулевого управления и оказать противодействие моменту рысканья, создаваемому разностью тяговых усилий между левыми и правыми колесами.
Figure 2. Управление разгоном на дороге с неоднородным поверхностным трением 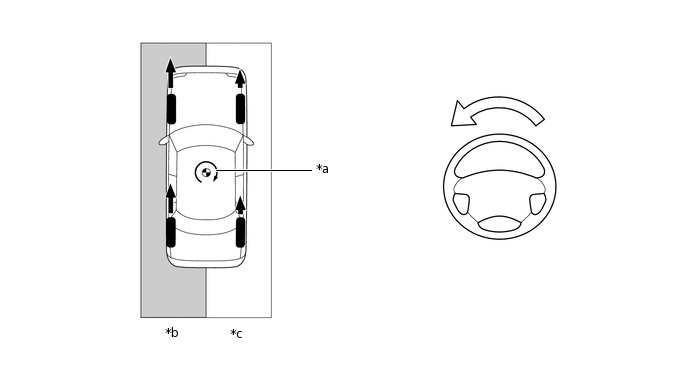
*a
Момент рысканья, создаваемый из-за разности тяговых усилий левых и правых колес
*b
Поверхность высокого трения
*c
Поверхность низкого трения
-
-

Тяговое усилие

Крутящий момент системы помощи рулевого управления, необходимый для противодействия моменту рысканья, создаваемого из-за разности тяговых усилий левых и правых колес
Управление торможением на дороге с неоднородным поверхностным трением
При торможении на дороге с неоднородным поверхностным трением, например, когда левые колеса находятся на асфальтовом покрытии, а правые — на снегу, автомобиль демонстрирует тенденцию к повороту в сторону с большим трением. Помимо традиционного управления системы АБС, координированное управление рулевым управлением обеспечивает управление крутящим моментом системы помощи рулевого управления, чтобы помочь водителю осуществить корректировку рулевого управления и оказать противодействие моменту рысканья, создаваемому разностью тормозных усилий между левыми и правыми колесами.
Figure 3. Управление торможением на дороге с неоднородным поверхностным трением 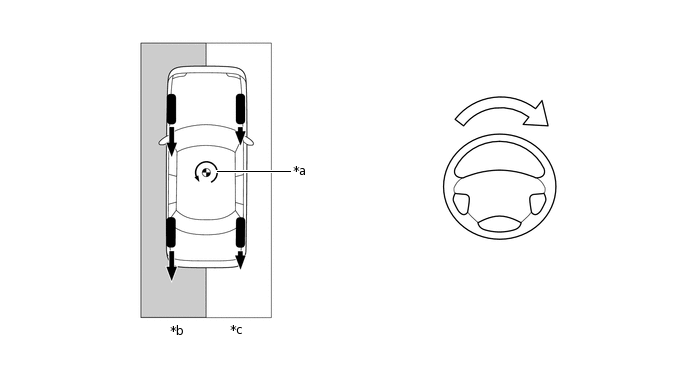
*a
Момент рысканья, создаваемый из-за разности тормозных усилий левых и правых колес
*b
Поверхность высокого трения
*c
Поверхность низкого трения
-
-
Тормозное усилие
Крутящий момент системы помощи рулевого управления, необходимый для противодействия моменту рысканья, создаваемого из-за разности тормозных усилий левых и правых колес
Управление при избыточной поворачиваемости автомобиля
Для определения избыточной поворачиваемости автомобиль сопоставляет угол увода колес и заданную скорость рысканья, полученных на основе угла поворота рулевого колеса и скорости автомобиля, с фактической скоростью рысканья. Если определяется избыточная поворачиваемость автомобиля, автомобиль обеспечивает первичное управление тормозным усилием наружных колес, чтобы создать момент по направлению к наружной траектории поворота, при котором избыточная поворачиваемость снижается. Кроме того, координированное управление рулевым управлением обеспечивает управление крутящим моментом системы помощи рулевого управления, чтобы помочь водителю осуществить корректировку рулевого управления.
Figure 4. Управление при избыточной поворачиваемости автомобиля 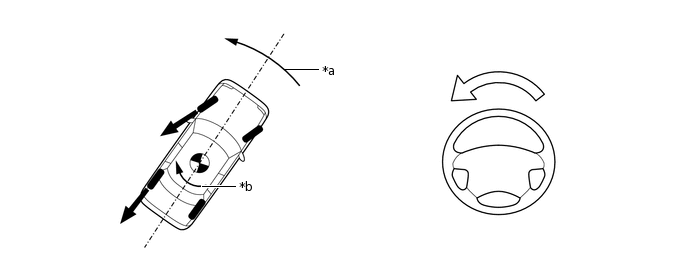
*a
Момент управления при избыточной поворачиваемости автомобиля
*b
Рысканье
Тормозное усилие
Крутящий момент системы помощи рулевого управления прилагается в этом направлении, чтобы обеспечить контроль недостаточной поворачиваемости автомобиля
Управление при недостаточной поворачиваемости автомобиля
Для определения недостаточной поворачиваемости автомобиль сопоставляет заданную скорость рысканья, полученную на основе угла поворота рулевого колеса и скорости автомобиля, с фактической скоростью рысканья. Если определяется недостаточная поворачиваемость автомобиля, автомобиль ограничивает тяговое усилие и обеспечивает управление тормозным усилием всех колес, чтобы создать момент, при котором автомобиль совмещается с заданной траекторией, чтобы понизить недостаточную поворачиваемость. Кроме того, координированное управление рулевым управлением обеспечивает управление крутящим моментом системы помощи рулевого управления, чтобы помочь водителю не поворачивать рулевое колесо избыточно.
Figure 5. Управление при избыточной поворачиваемости автомобиля 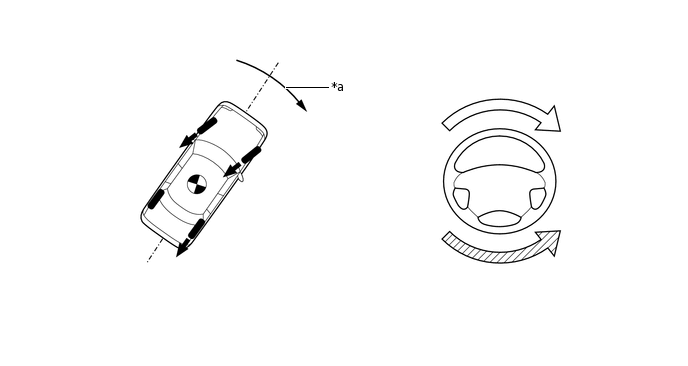
*a
Момент управления при недостаточной поворачиваемости автомобиля
-
-
Управление, осуществляемое системой VSC
При недостаточной поворачиваемости — направление, при котором крутящий момент системы помощи рулевого управления облегчает поворачивание рулевого колеса для обеспечения устойчивости автомобиля

При недостаточной поворачиваемости — противодействующая сила, которая затрудняет поворачивание рулевого колеса и ухудшает устойчивость автомобиля
-
-