СИСТЕМА SFI ОПИСАНИЕ ДАТЧИКА ПОЛОЖЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКИ
КОНСТРУКЦИЯ
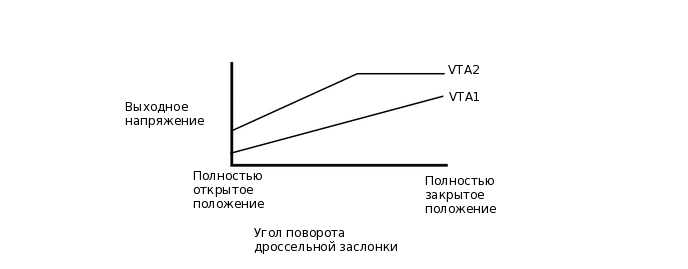
Используется бесконтактный датчик положения дроссельной заслонки. Датчик представляет собой датчик Холла*2, который преобразует напряженность магнитного поля в электрический сигнал за счет эффекта Холла*1 и формирует выходное напряжение, которое может непосредственно измеряться и отражает угол поворота дроссельной заслонки. При изменении угла поворота дроссельной заслонки изменяется угол магнитного поля относительно направления тока в датчике Холла. В результате изменяются сила тока и напряженность вертикального магнитного поля. В связи с этим изменение напряжения, генерируемого в вертикальном направлении по отношению к току, и направление магнитного поля передаются в ECM в качестве сигнала угла поворота дроссельной заслонки. Кроме того, для обеспечения надежности используются дублирующие датчики (основной и вспомогательный) с разными выходными характеристиками.
Tip:*1: Явление, при котором возникает разность потенциалов при протекании электрического тока и создании магнитного поля в вертикальном направлении, когда электрический ток протекает через стержень или пластинчатый проводник или полупроводник.
*2: Электрическое устройство, которое использует ЭДС, возникающую в связи с разностью потенциалов в магнитном поле.
Figure 1. Выходная характеристика датчика